This robot was my first real "build", at least in comparison to 841. As such, this is my first real page talking about how the robot was built, but never really came to be (despite my efforts). Now, originally I had stated I would be heading to Design, Print, Destroy at the University of Illinois to watch, but in September 2019 I decided I'd throw my hat into the ring and at least try my hand at some kind of 3D-printed robot. The catch? I'd try to use everything I had on me, using as few new parts as possible, and coming up with a design that would be, even in the slightest, different and interesting.
After going onto yeggi.com, I eventually found a robot titled "Antweight Shell Spinner" by Adam Conus (left). I did a bit of research, and it didn't take me long to find out "Plastique" didn't perform so well and wound up exploding in its final fight. During the robot's run, it would garner the attention of a man named Kevin Shultis, who would rework the design into a robot he called "Mars Attacks" (right). It was later renamed to "Mars Attacks: Itself" for the fact that it also exploded. Unlike Plastique, however, this one managed to explode twice in its short-lived career.
After going onto yeggi.com, I eventually found a robot titled "Antweight Shell Spinner" by Adam Conus (left). I did a bit of research, and it didn't take me long to find out "Plastique" didn't perform so well and wound up exploding in its final fight. During the robot's run, it would garner the attention of a man named Kevin Shultis, who would rework the design into a robot he called "Mars Attacks" (right). It was later renamed to "Mars Attacks: Itself" for the fact that it also exploded. Unlike Plastique, however, this one managed to explode twice in its short-lived career.

|
|
Naturally, if something didn't work after two iterations, it's probably safe to assume that the design is flawed and is best left alone: what's the damage in trying something unoriginal, tried, and true? Well, there was really only one reason on my mind, and that reason has two words: Asymmetric Shell. Why, you may ask? Simple: most shell spinners feature tons of little teeth or a few really big ones, but very very few use an asymmetric shell. The only ones I could even find on databases were Motorhead (Team Y?) and Dark Orb (Team Dark Forces).

|

|
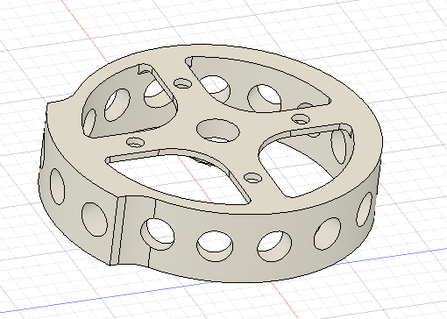
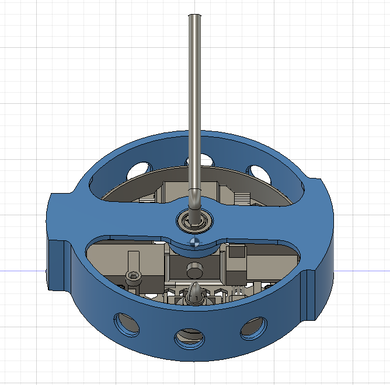
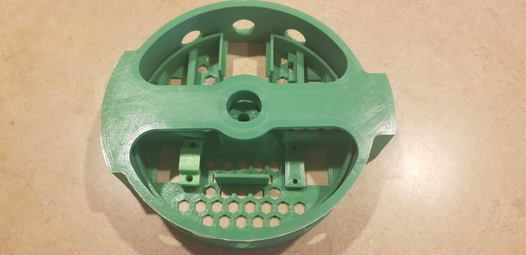
Firing up the computers at my local library, I was able to throw together this single-tooth monstrosity. The dimensions were good, but as a solid component it weighed in at a whopping 13oz. The holes, which were added after the initial weigh-in, only brought it down to about 10oz, still too heavy for the rest of the robot. From here, I redesigned the shell and wound up with what can be seen below. It still needed holes cut through it to make weight, but in the end the robot's shell was about 8oz exact: plenty of weight for the weapon with enough leftover weight to work with. Within 48 hours I had designed and sent off the CADs for the robot to be made by Kyle Mackelroy.
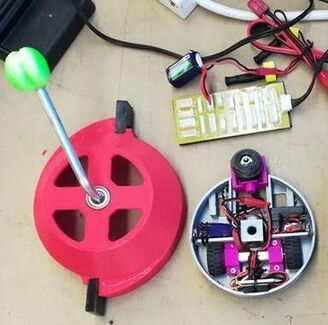
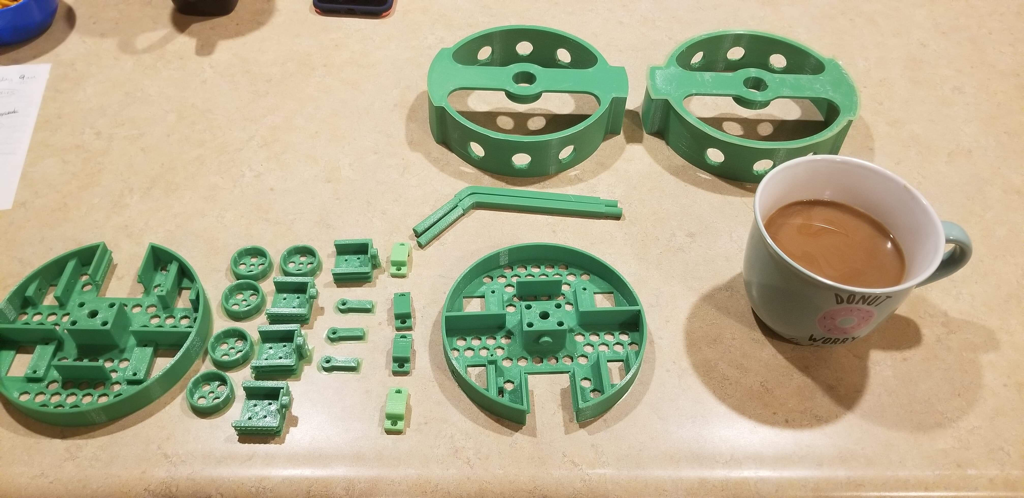
Once everything is printed off, Kyle sends me the pieces... and it's once I receive those parts where the troubles began. First, I hadn't printed off any wheels, which I assume are kind of important for a robot that needs four of them? The wheels you see below are actually for the weapon - the weapon motor sits on a spring-loaded sled that pushes the wheel against the inside of the shell to force it to spin. When I did get the wheels ordered, they were all the wrong size: either 1mm too big, or 1mm too small. Second, I miscalculated the amount of clearance necessary so that the shell didn't make contact with anything else inside of the robot. The weapon wheel I mentioned earlier was mounted by screwing it in like it was a propeller - I didn't leave enough clearance between the propeller mount and the shell, resulting in the shell grazing the top of the propeller mount. Finally, either I bought the wrong kind of bolts, or everything just didn't fit correctly. The screws I bought seemed to be too small, and would simply sit in the holes rather than attempt to be screwed in. In contrast, the directional poles simply wouldn't fit inside of the bearings that were press-fit into the holes of the shell or the hole on the base of the robot. All of this wasn't enough to deter me from getting it at least halfway operational come October 19th. However, Arrhythmia had to be pushed aside due to some family issues that were far more important than getting this thing up and running.
At the end of the day, Arrhythmia was an ambitious design that I should've spent more time on during the development phase to ensure that nothing was wrong. Multiple complications both technical and personal put this design on the shelf. That's not to say, however, that the concept of an asymmetric shell spinner has left my mind...
